
- Visual Computing
A System for Retargeting of Streaming Video
- Human Computer Interaction
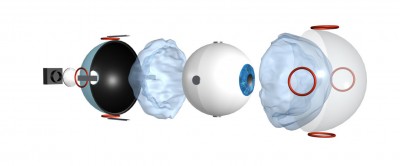
A Fluid-Suspension Electromagnetically Driven Eye with Video Capability for Animatronic Applications
- Robotics
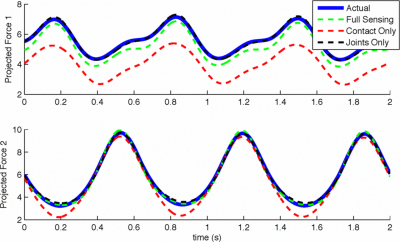
Inertial Parameter Estimation of Floating Base Humanoid Systems using Partial Force Sensing

- Robotics
Effect of Foot Shape on Locomotion of Active Biped Robots
- Robotics
Simultaneous Tracking and Balancing of Humanoid Robots for Imitating Human Motion Capture Data
- Visual Computing
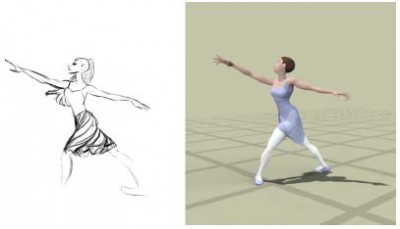
Leveraging the Talent of Hand Animators to Create Three-Dimensional Animation
- Visual Computing
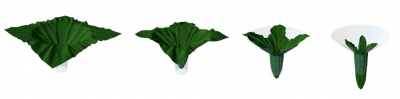
Robust Treatment of Simultaneous Collisions
Page 60 of 60