
- Visual Computing
Image-Space Control Variates for Rendering

- Robotics
Dynamic Skin Deformation SimulationUsing Musculoskeletal Model and Soft Tissue Dynamics
- Visual Computing
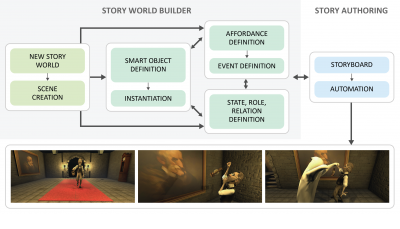
Evaluating Accessible Graphical Interfaces for Building Story Worlds
- Press Release: More than animation: Software supports animated storytelling

- Machine Learning & Data Analytics
Semi-Situated Learning of Verbal and Nonverbal Content for Repeated Human-Robot Interaction
- Press Release: Crowd workers help robot keep conversation fresh
- Human Computer Interaction
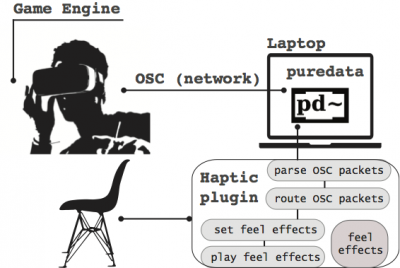
VR360HD- A VR360° Player with Enhanced Haptic Feedback
- Visual Computing
Synthetic Prior Design for Real-Time Face Tracking

- Visual Computing
Point Cloud Noise and Outlier Removal for Image-Based 3D Reconstruction

- Visual Computing
Depth from Gradients in Dense Light Fields for Object Reconstruction
- Materials & Fabrication
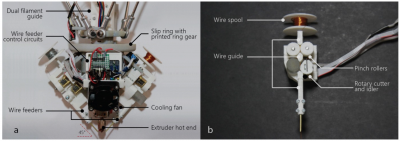
A 3D Printer for Interactive Electromagnetic Devices
- Robotics
A Task-Level Iterative Learning Control Algorithm for Accurate Tracking in Manipulators with Modeling Errors and Stringent Joint Position Limits
- Visual Computing
Pixel History Linear Models for Real-Time Temporal Filtering
- Robotics
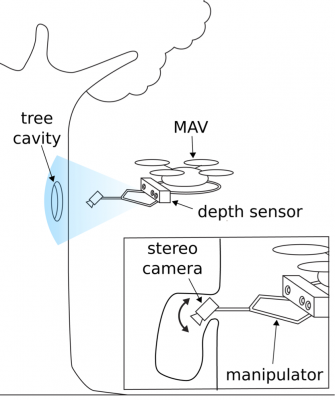
Tree Cavity Inspection Using Aerial Robots
Page 16 of 60