Abstract
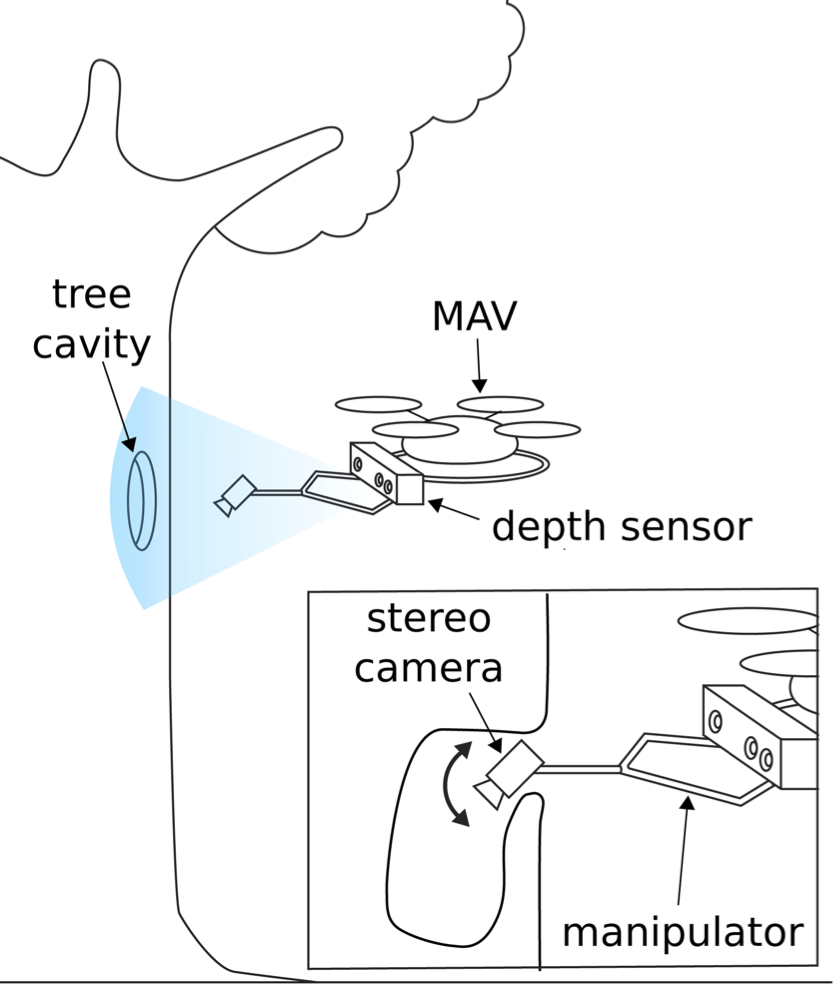
We present an aerial robotic platform for remote tree cavity inspection, based on a hexacopter Micro-Aerial vehicle (MAV) equipped with a dexterous manipulator. The goal is to make the inspection process safer and more efficient and facilitate data collection about tree cavities, which are important for the conservation of biodiversity in forest ecosystems. This work focuses on two key enabling technologies, namely a vision-based cavity detection system and strategies for high level control of the MAV and manipulator. The results of both simulation and real-world experiments are discussed at the end of the paper and demonstrate the effectiveness of our approach.
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.