Abstract
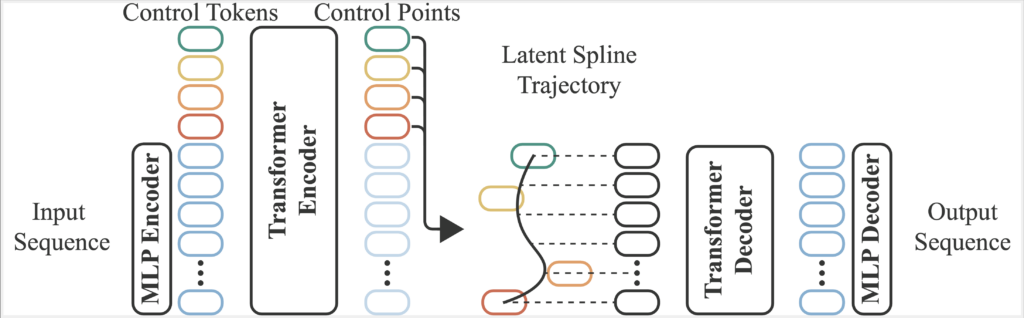
We introduce Spline-based Transformers, a novel class of Transformer models that eliminate the need for positional encoding. Inspired by workflows using splines in computer animation, our Spline-based Transformers embed an input sequence of elements as a smooth trajectory in latent space. Overcoming drawbacks of positional encoding such as sequence length extrapolation, Spline-based Transformers also provide a novel way for users to interact with transformer latent spaces by directly manipulating the latent control points to create new latent trajectories and sequences. We demonstrate the superior performance of our approach in comparison to conventional positional encoding on a variety of datasets, ranging from synthetic 2D to large-scale real-world datasets of images, 3D shapes, and animations.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.