Abstract
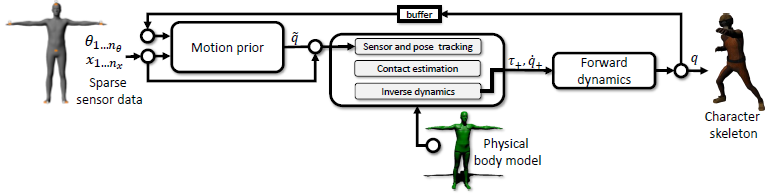
We propose a framework for motion capture using sparse multi-modal sensor sets, including data obtained from optical markers and inertial measurement units. A small number of sensors leaves the performer unencumbered by not requiring dense coverage of the body. An inverse dynamics solver and physics-based body model are used, ensuring physical plausibility by computing joint torques and contact forces. A prior model is also used to give an improved estimate of motion of internal joints. The behavior of our system is evaluated using several black box motion priors. We show that our system can follow and simulate a wide range of dynamic movements including bipedal gait, ballistic movements such as jumping, and interaction with the environment. The reconstructed motion has low error and appears natural. As both the internal forces and contacts are obtained with high credibility, it is also useful for human movement analysis.
Additional Content
https://youtu.be/_a5EXPahjqA
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.