Abstract
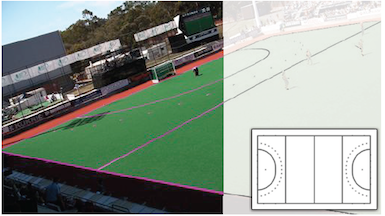
Point-based targets, such as checkerboards, are often not practical for outdoor camera calibration, as cameras are usually at significant heights requiring extremely large calibration patterns on the ground. Fortunately, it is possible to make use of existing non-point landmarks in the scene by formulating camera calibration in terms of image alignment. In this paper, we simultaneously estimate the camera intrinsic, extrinsic and lens distortion parameters directly by aligning to a planar schematic of the scene. For cameras with square pixels and known principal point, finding the parameters to such an image warp is equivalent to calibrating the camera. Overhead schematics of many environments resemble edge images. Edge images are difficult to align using image-based algorithms because both the image and its gradient are sparse. We employ a ‘long range’ gradient which enables informative parameter updates at each iteration while maintaining a precise alignment measure. As a result, we are able to calibrate our camera models robustly using regular gradient-based image alignment, given an initial ground to image homography estimate.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.