Abstract
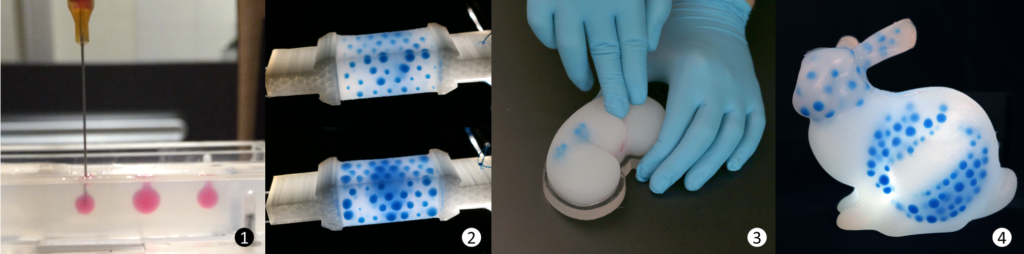
We present a method for designing and fabricating MetaSilicones—composite silicone rubbers that exhibit desired macroscopic mechanical properties. The underlying principle of our approach is to inject spherical inclusions of a liquid dopant material into a silicone matrix material. By varying the number, size, and locations of these inclusions as well as their material, a broad range of mechanical properties can be achieved. The technical core of our approach is formed by an optimization algorithm that, combining a simulation model based on extended finite elements (XFEM) and sensitivity analysis, computes inclusion distributions that lead to desired stiffness properties on the macroscopic level. We explore the design space of MetaSilicone on an extensive set of simulation experiments involving materials with optimized uni- and bi-directional stiffness, spatially-graded properties, as well as multi-material composites. We present validation through standard measurements on physical prototypes, which we fabricate on a modified filament-based 3D printer, thus combining the advantages of digital fabrication with the mechanical performance of silicone elastomers.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.