Abstract
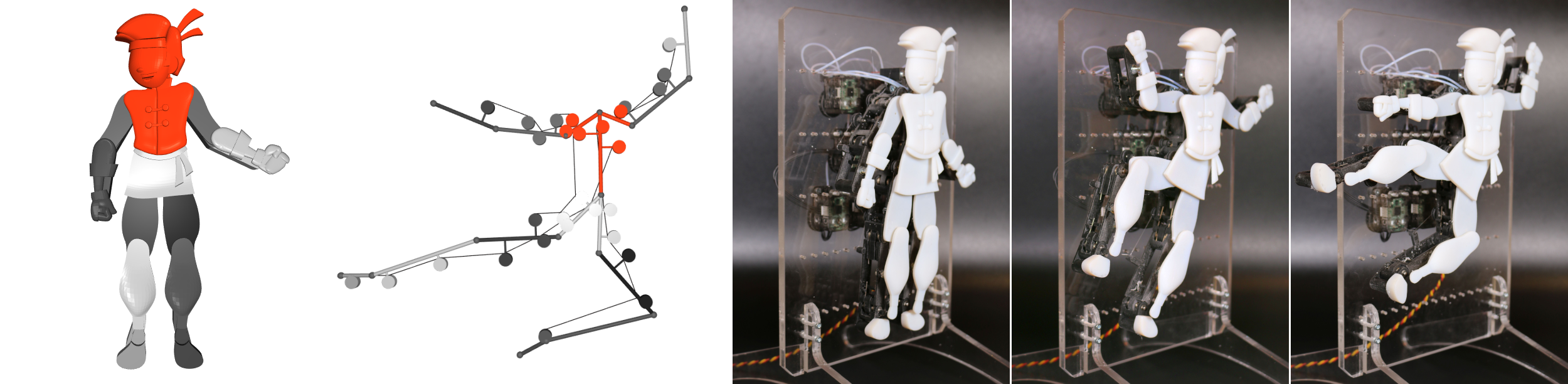
In this paper, we present an optimization-based approach for the design of cable-driven kinematic chains and trees. Our system takes as input a hierarchical assembly consisting of rigid links jointed together with hinges. The user also specifies a set of target poses or keyframes using inverse kinematics. Our approach places torsional springs at the joints and computes a cable network that allows us to reproduce the specified target poses. We start with a large set of cables that have randomly chosen routing points and we gradually remove the redundancy. Then we refine the routing points taking into account the path between poses or keyframes in order to further reduce the number of cables and minimize required control forces. We propose a reduced coordinate formulation that links control forces to joint angles and routing points, enabling the co-optimization of a cable network together with the required actuation forces. We demonstrate the efficacy of our technique by designing and fabricating a cable-driven, animated character, an animatronic hand, and a specialized gripper.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.