Abstract
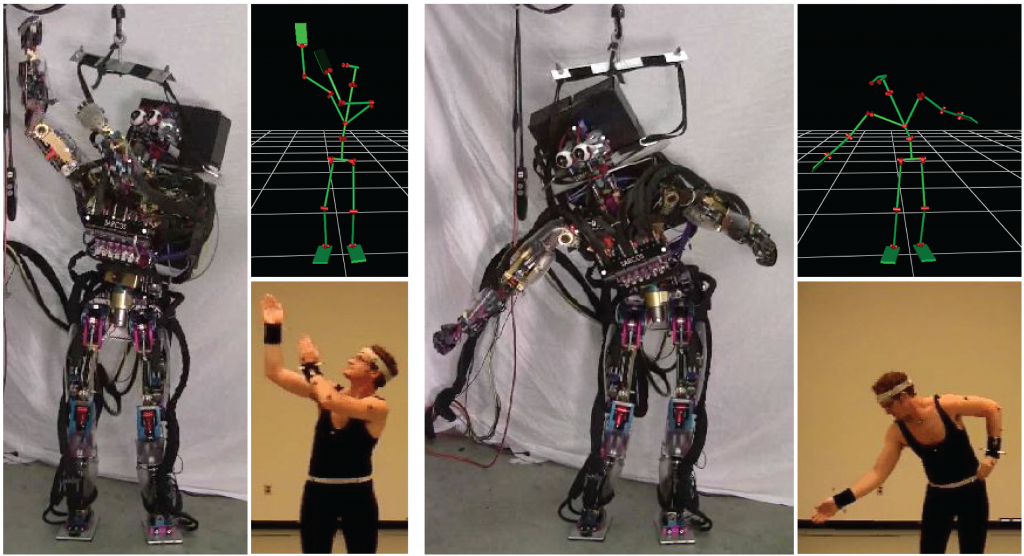
Motion capture is a good source of data for programming humanoid robots because it contains the natural styles and synergies of human behaviors. However, it is difficult to directly use captured motion data because the kinematics and dynamics of humanoid robots differ significantly from those of humans. In our previous work, we developed a controller that allows a robot to maintain balance while tracking a given reference motion that does not include contact state changes. The controller consists of a balance controller based on a simplified robot model and a tracking controller that performs local joint feedback and an optimization process to obtain the joint torques to simultaneously realize balancing and tracking. In this paper, we improve the controller to address the issues related to root position/orientation estimation, model uncertainties, and the difference between expected and actual contact forces. We implement the controller on a full-body, force-controlled humanoid robot. Experimental results demonstrate that the controller can successfully make the robot track captured human motion sequences.
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.