Abstract
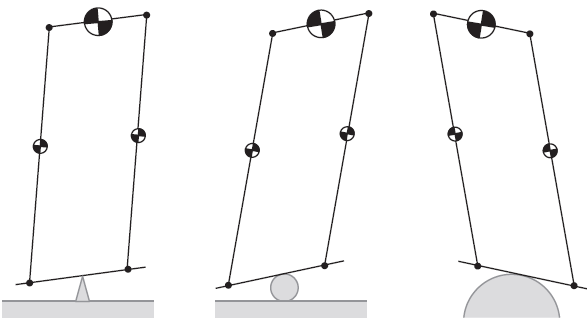
This paper studies the balancing of simple planar bipedal robot models in dynamic, unstable environments like seesaw, bongoboard and board on a curved floor. This paper derives output feedback controllers that successfully stabilize seesaw, bongoboard and curved floor models using only global robot information and without any direct feedback of the dynamic environment, and hence demonstrates that direct feedback of environment information is not essential for successfully stabilizing the models considered in this paper. This paper presents an optimization to derive stabilizing output feedback controllers that are robust to disturbances on the board. It analyzes the robustness of the derived output feedback controllers to disturbances and parameter uncertainties and compares their performance with similarly derived robust linear quadratic regulator (LQR) controllers. This paper also presents nonlinear simulation results of the output feedback controllers’ successful stabilization of bongoboard, seesaw, and curved floor models.
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.