Abstract
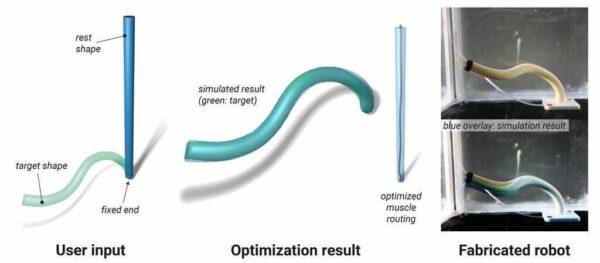
This paper introduces a computational approach for routing thin artificial muscle actuators through hyperelastic soft robots, in order to achieve a desired deformation behavior. Provided with a robot design, and a set of example deformations, we continuously co-optimize the routing of actuators, and their actuation, to approximate example deformations as closely as possible.
We introduce a data-driven model for McKibben muscles, modeling their contraction behavior when embedded in a silicone elastomer matrix. To enable the automated routing, a differentiable hyperelastic material simulation is presented. Because standard finite elements are not differentiable at element boundaries, we implement a Moving Least Squares formulation, making the deformation gradient twice-differentiable.
Our robots are fabricated in a two-step molding process, with the complex mold design steps automated. While most soft robotic designs utilize bending, we study the use of our technique in approximating twisting deformations on a bar example. To demonstrate the efficacy of our technique in soft robotic design, we show a continuum robot, a tentacle, and a 4-legged walking robot.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.