Abstract
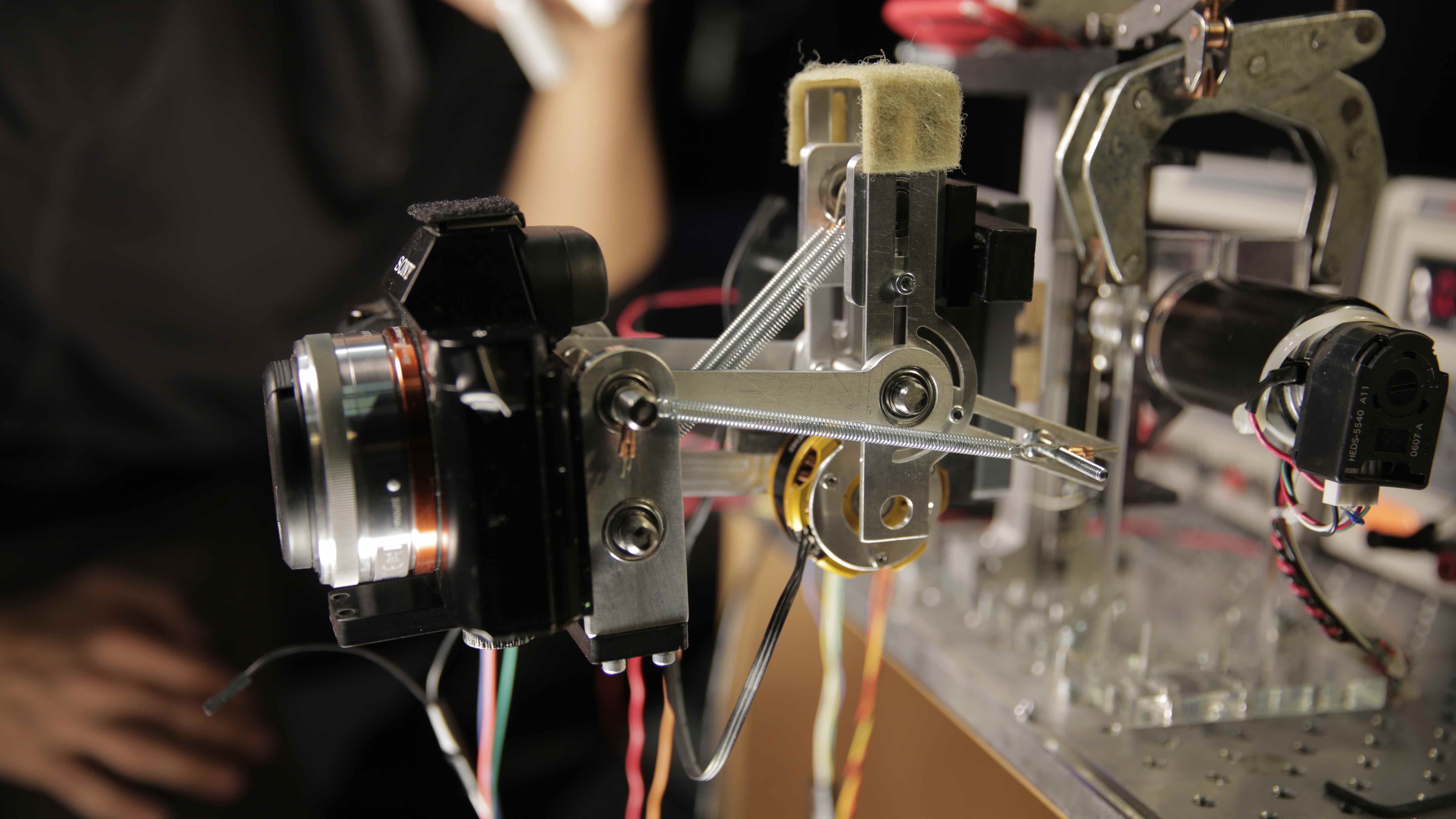
Camera technology is continuously improving and high quality cameras are now available under one pound of weight. This enables novel and innovative uses, for example at the end of a long boom pole. Unfortunately lighter cameras used in such ways are more susceptible to vertical disturbances and the bouncing associated with walking resulting in shaking and distortion. We introduce a miniaturized active stabilization mechanism that attenuates such disturbances and keeps the camera steady. Feedback control effectively emulates the stabilizing inertial dynamics associated with higher weights without the penalty of higher weight. The system uses only accelerometer readings and avoids pure integration and associated numerical drift issues. We design, analyze, build, and test the mechanism to show appropriate performance.
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.