Abstract
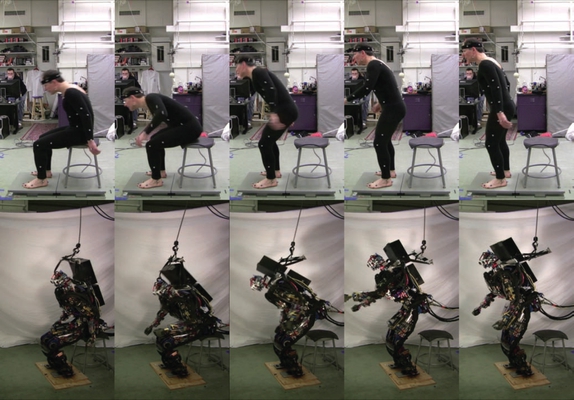
In this work, we perform the challenging task of a humanoid robot standing up from a chair. First we recorded demonstrations of sit-to-stand motions from normal human subjects as well as actors performing stylized standing motions (e.g. imitating an elderly person). Ground contact force information was also collected for these motions, in order to estimate the human’s center of mass trajectory. We then mapped the demonstrated motions to the humanoid robot via an inverse kinematics procedure that attempts to track the human’s kinematics as well as their center-of-mass trajectory. In order to estimate the robot’s center-of-mass position accurately, we additionally used an inertial parameter identification technique that fit mass and center-of-mass link parameters from measured force data. We demonstrate the resulting motions on the Carnegie Mellon/Sarcos hydraulic humanoid robot.
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.