Abstract
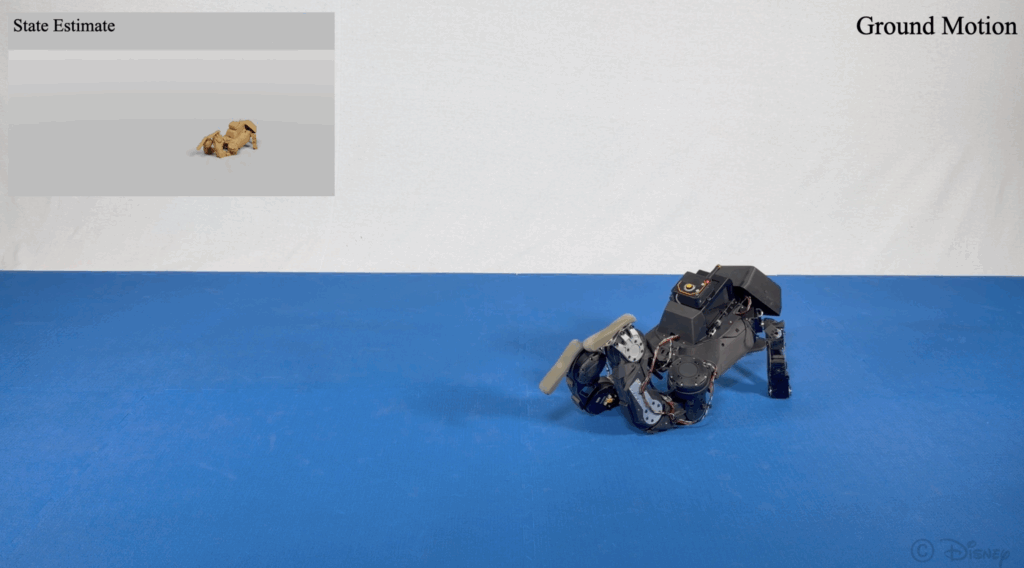
Robust state estimation for highly dynamic motion of legged robots remains challenging, especially in dynamic, contact-rich scenarios. Traditional approaches often rely on binary contact states that fail to capture the nuances of partial contact or directional slippage. This paper presents CoCo-InEKF, a differentiable invariant extended Kalman filter that utilizes continuous contact velocity covariances instead of binary contact states. These learned covariances allow the method to dynamically modulate contact confidence, accounting for more nuanced conditions ranging from firm contact to directional slippage or no contact. To predict these covariances for a set of predefined contact candidate points, we employ a lightweight neural network trained end-to-end using a state-error loss. This approach eliminates the need for heuristic ground-truth contact labels. In addition, we propose an automated contact candidate selection procedure and demonstrate that our method is insensitive to their exact placement. Experiments on a bipedal robot demonstrate a superior accuracy-efficiency tradeoff for linear velocity estimation, as well as improved filter consistency compared to baseline methods. This enables the robust execution of challenging motions, including dancing and complex ground interactions – both in simulation and in the real world.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.