Abstract
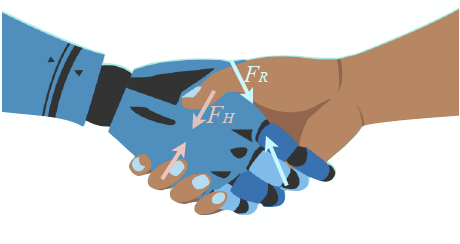
In this paper we investigate the role of haptic feedback in human/robot handshaking by comparing different force controllers. The basic hypothesis is that in human handshaking force control there is a balance between an intrinsic (open–loop) and extrinsic (closed–loop) contribution. We use an underactuated anthropomorphic robotic hand, the Pisa/IIT hand, instrumented with a set of pressure sensors estimating the grip force applied by humans. In a first set of experiments we ask subjects to mimic a given force profile applied by the robot hand, to understand how human perceive and are able to reproduce a handshaking force. Using the obtained results, we implement three different handshaking controllers in which we varied the intrinsic and extrinsic contributions and in a second set of experiments we ask participants to evaluate them in a user study. We show that a sensorimotor delay mimicking the reaction time of the Central Nervous System (CNS) is beneficial for making interactions more human-like. Moreover, we demonstrate that humans exploit closed-loop control for handshaking. By varying the controller we show that we can change the perceived handshake quality, and also influence personality traits attributed to the robot.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.