Abstract
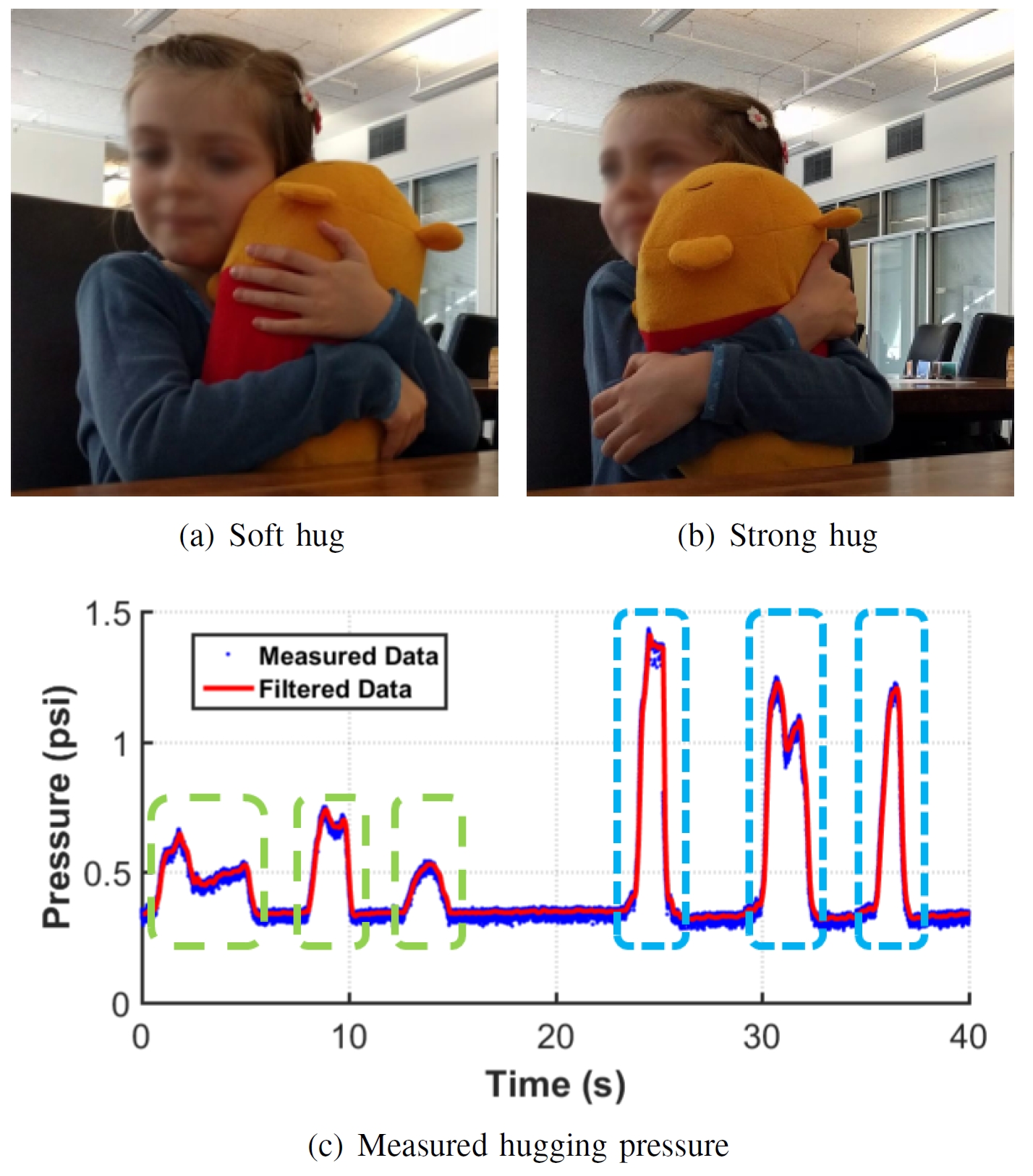
We have developed a toy sized humanoid robot with soft air-filled modules on its links which sense contact and protect the robot and any interacting humans from damaging collisions. This robot meant for robust physical interaction, is required to endure contact with children in the form of hugs and other playful interactions. It is, therefore, necessary to quantify the forces exerted during these interactions so that robots can be designed to both withstand these forces, as well as interact safely and intuitively in these situations. To quantify the range of forces exerted by children when performing both soft and strong hugs, we conducted a study in which 28 children (11 boys, 17 girls) between 4 and 10 years old hugged a pressure sensing doll while the pressure was recorded. We found a child’s maximum expected hugging force (2.623 psi for our setup) during free play. The data gathered in this study will guide the further development of our physically interactive robot.
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.