Abstract
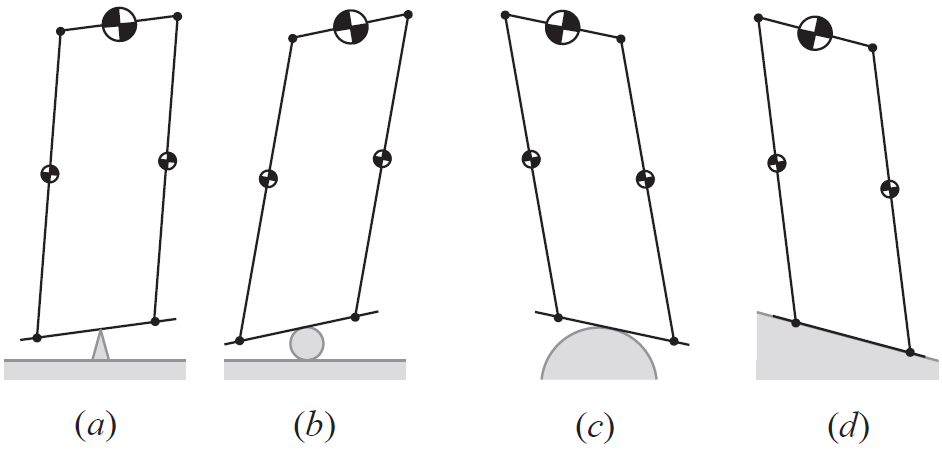
This paper presents a novel universal balancing controller that successfully stabilizes a planar bipedal robot in dynamic, unstable environments like seesaw and bongoboards, and also in static environments like curved and flat floors. These different dynamic systems have state spaces with different dimensions, and hence instead of using full state feedback, the universal controller is derived as a single output feedback controller that stabilizes them. This paper analyzes the robustness of the derived universal controller to disturbances and parameter uncertainties and demonstrates its universality and superiority to similarly derived LQR and H∞ controllers. This paper also presents nonlinear simulation results of the universal controller successfully stabilizing a family of bongoboard, curved floor, seesaw, tilting and rocking floor models.
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.