Abstract
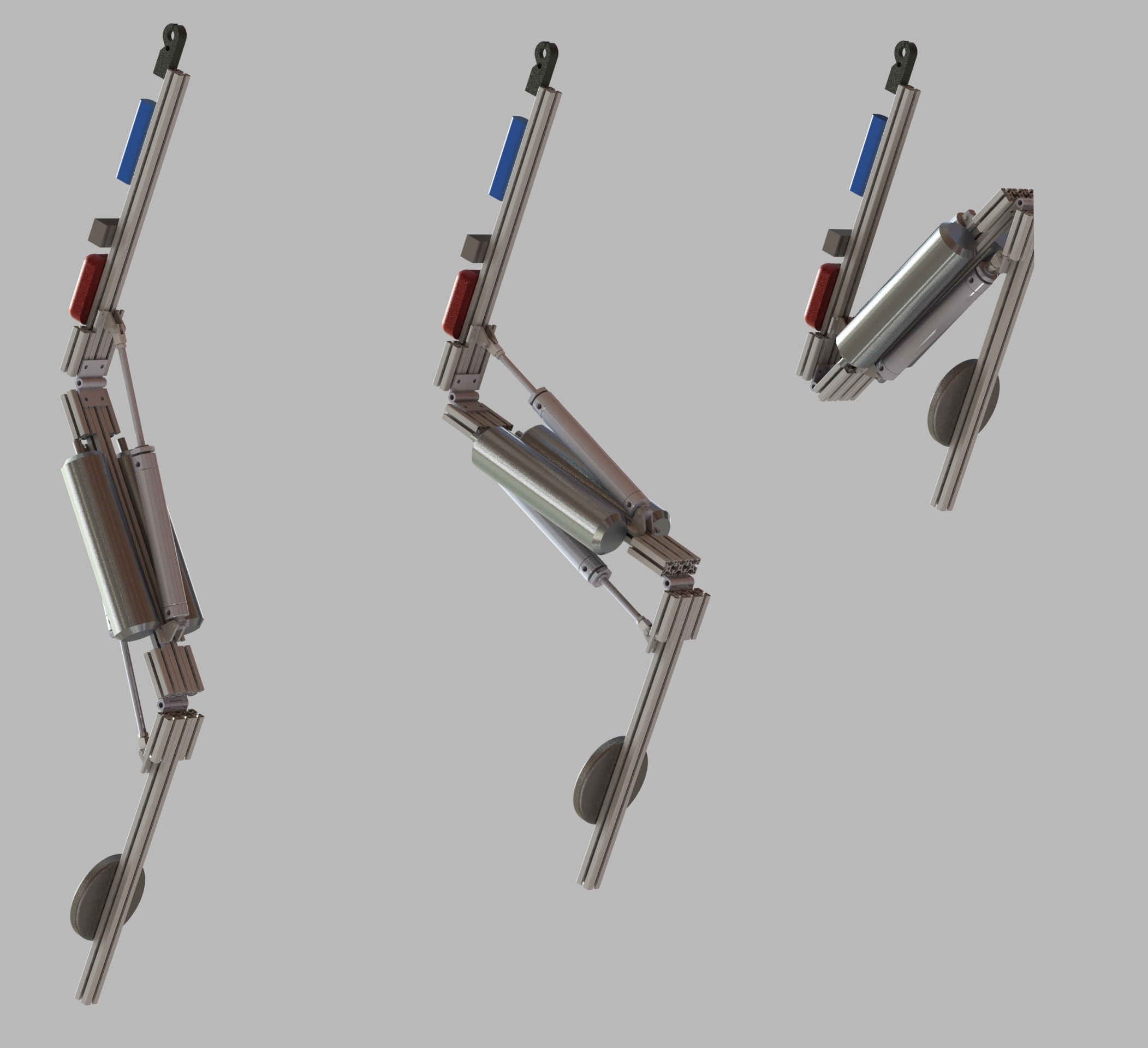
Human performers have developed impressive acrobatic techniques over thousands of years of practicing the gymnastic arts. At the same time, robots have started to become more mobile and autonomous and can begin to imitate these stunts in dramatic and informative ways. We present a simple two degree of freedom robot that uses a gravity-driven pendulum launch and produces a variety of somersaulting stunts. The robot uses an IMU and a laser range-finder to estimate its state mid-flight and actuates to change its motion both on and off the pendulum. We discuss the dynamics of this behavior in a framework of acrobatic capability and present experimental results.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.