Abstract
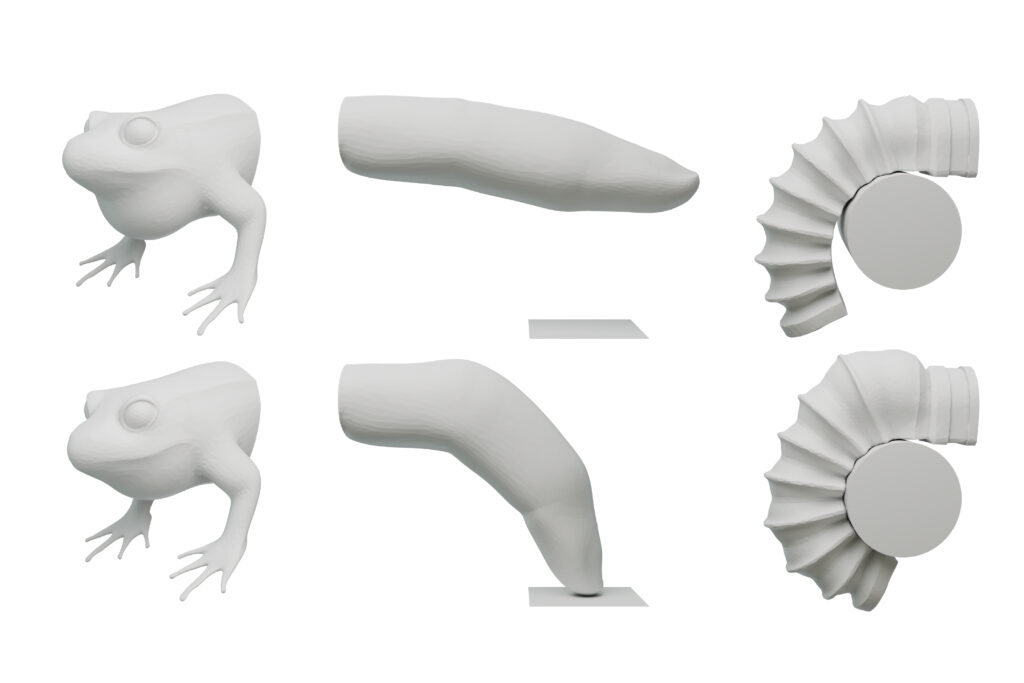
We propose a computational design pipeline for pneumatically-actuated soft robots interacting with their environment through contact. We optimize the shape of the robot with a shape optimization approach, using a physically-accurate high-order finite element model for the forward simulation. Our approach enables fine-grained control over both deformation and contact forces by optimizing the shape of internal cavities, which we exploit to design pneumatically-actuated robots that can assume user-prescribed poses, or apply user-controlled forces. We demonstrate the efficacy of our method on two artistic and two functional examples.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.