Abstract
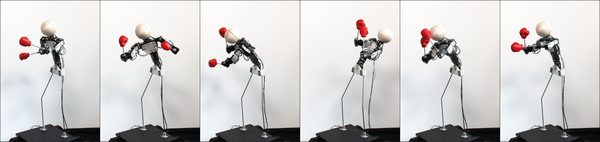
Creating animations for robotic characters is very challenging due to the constraints imposed by their physical nature. In particular, the combination of fast motions and unavoidable structural deformations leads to mechanical oscillations that negatively affect their performances. Our goal is to automatically transfer motions created using traditional animation software to robotic characters while avoiding such artifacts. To this end, we develop an optimization-based, dynamics-aware motion retargeting system that adjusts an input motion such that visually salient low-frequency, large amplitude vibrations are suppressed. The technical core of our animation system consists of a differentiable dynamics simulator that provides constraint-based two-way coupling between rigid and flexible components. We demonstrate the efficacy of our method through experiments performed on a total of five robotic characters including a child-sized animatronic figure that features highly dynamic drumming and boxing motions.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.