- Visual Computing
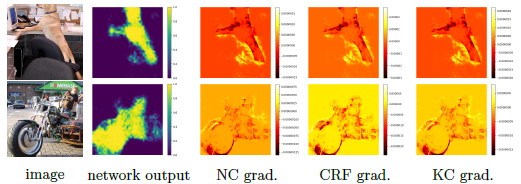
On Regularized Losses for Weakly-supervised CNN Segmentation

- Visual Computing
Denoising Deep Monte Carlo Renderings
- Visual Computing
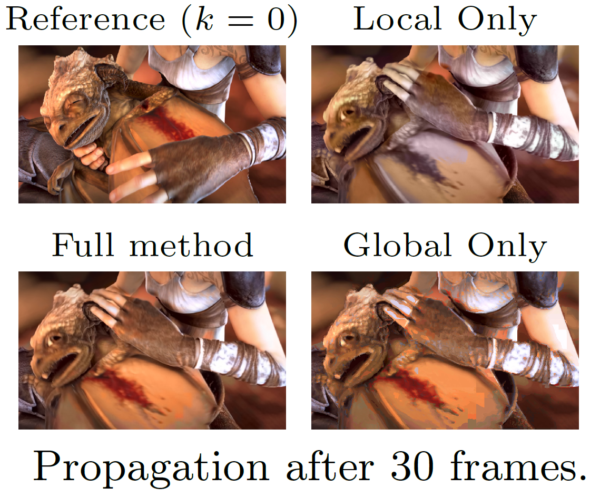
Deep Video Color Propagation
- Human Computer Interaction
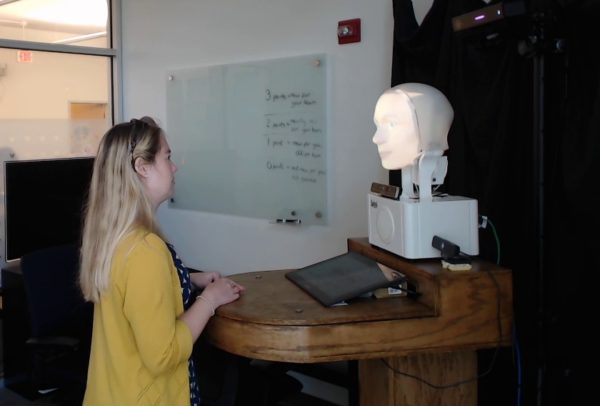
Expressing Coherent Personality with Incremental Acquisition of Multimodal Behaviors

- Visual Computing
An Omnistereoscopic Video Pipeline for Capture and Display of Real-World VR

- Visual Computing
Denoising with Kernel Prediction and Asymmetric Loss Functions
- Visual Computing
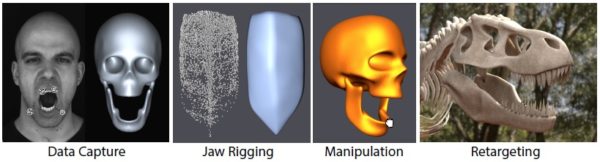
An Empirical Rig for Jaw Animation
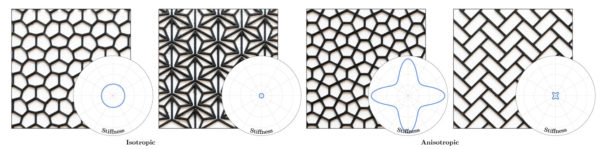
- Materials & Fabrication
Mechanical Characterization of Structured Sheet Materials
- Visual Computing
AR Poser: Automatically Augmenting Mobile Pictures with Digital Avatars Imitating Poses
- Visual Computing
HairControl: A Tracking Solution for Directable Hair Simulation
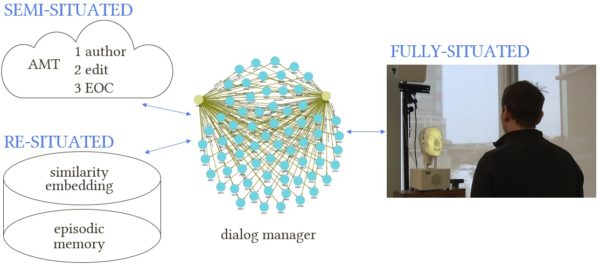
- Human Computer Interaction
Challenges in Exploiting Conversational Memory in Human-Agent Interaction

- Visual Computing
User-Guided Lip Correction for Facial Performance Capture
Page 6 of 60