Abstract
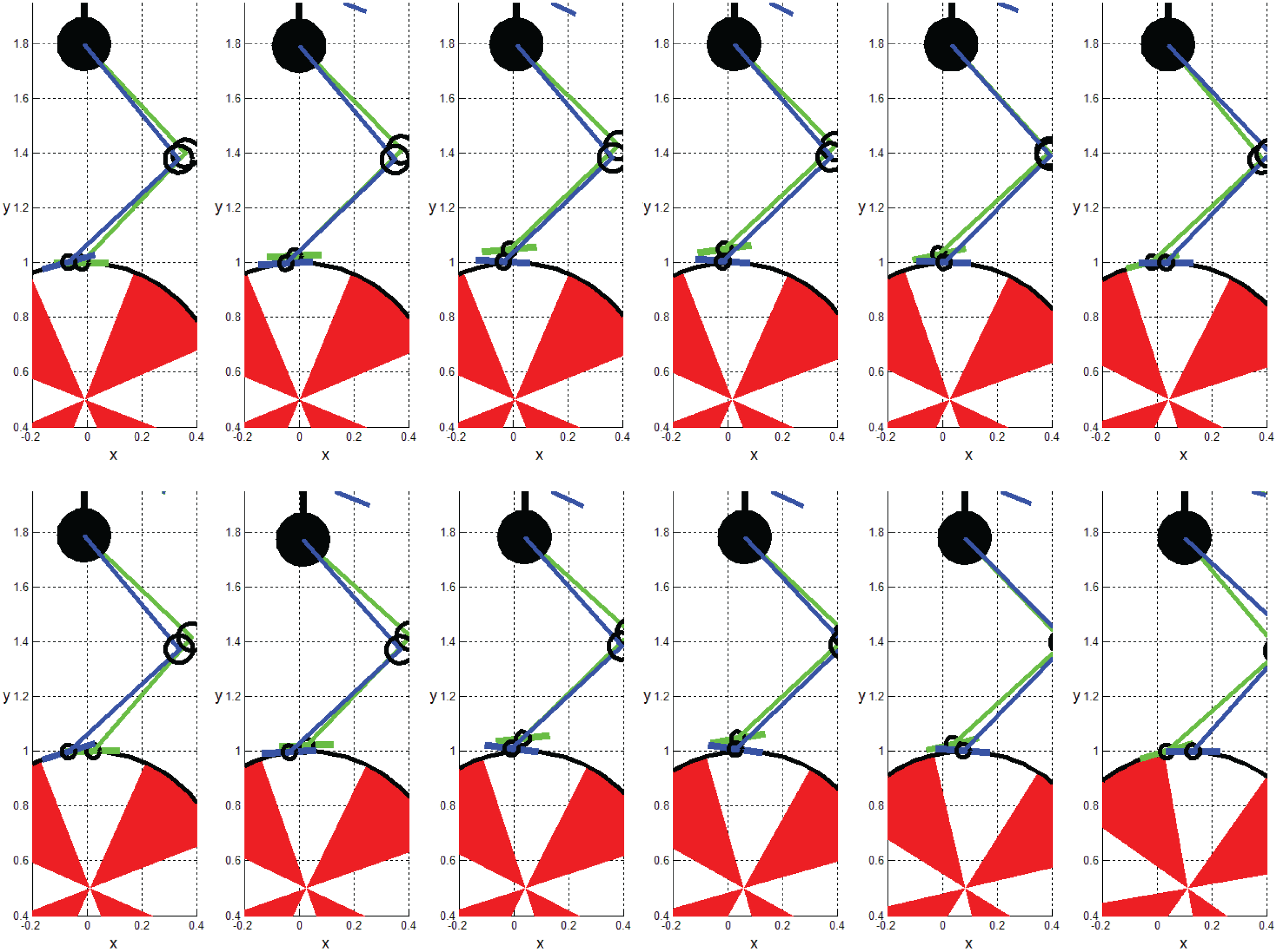
This project investigates the optimization of, and presents a control framework for, a biped robot to maintain balance and walk on a rolling ball. We design a balance controller for a simplified linear model of a biped robot, which comprises a foot connected to a lump mass through an ankle joint and a translational spring and damper. We also derive a collision model for the system consisting of the cylinder, supporting leg, and swing leg. The control framework consists of two primary components: a balance controller and a footstep planner.
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.