Abstract
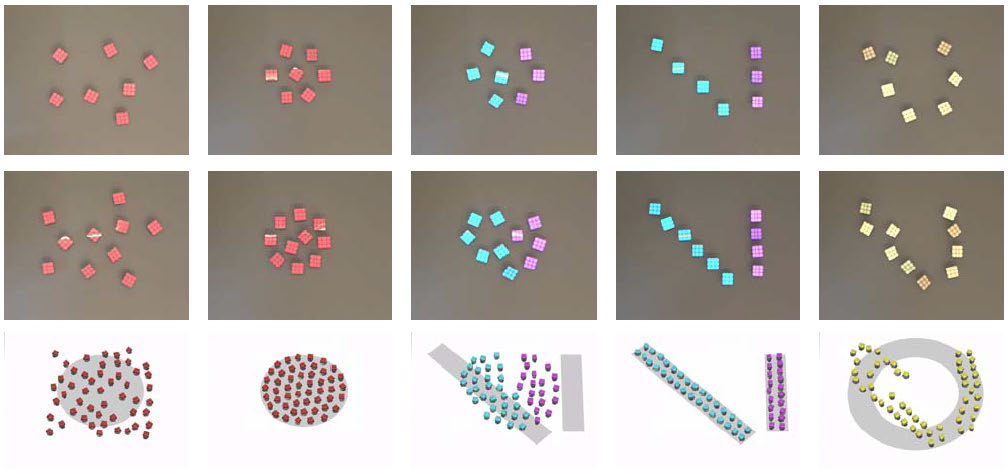
This paper describes work on multi-robot pattern formation. Arbitrary target patterns are represented with an optimal robot deployment, using a method that is independent of the number of robots. Furthermore, the trajectories are visually appealing in the sense of being smooth, oscillation free, and showing fast convergence. A distributed controller guarantees collision free trajectories while taking into account the kinematics of differentially driven robots. Experimental results are provided for a representative set of patterns, for a swarm of up to ten physical robots, and for fifty virtual robots in simulation.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.