Abstract
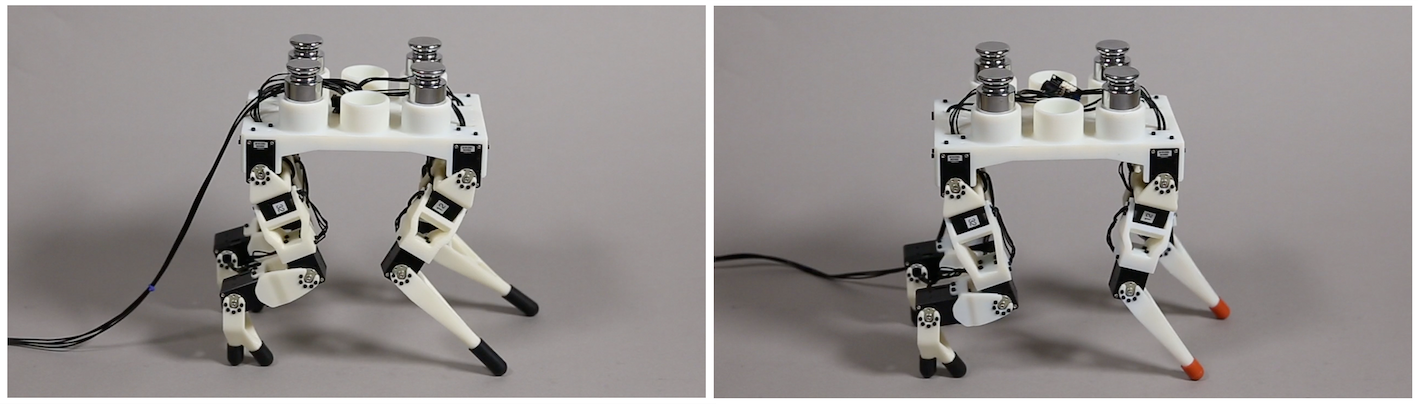
We present a novel computational approach to optimizing the morphological design of robots. Our framework takes as input a parameterized robot design and a motion plan consisting of trajectories for end-effectors, as well as optionally, for its body. The algorithm we propose is used to optimize design parameters, namely link lengths and the placement of actuators, while concurrently adjusting motion parameters such as joint trajectories, actuator inputs, and contact forces. Our key insight is that the complex relationship between design and motion parameters can be established via sensitivity analysis if the robot’s movements are modeled as spatio-temporal solutions to optimal control problems. This relationship between form and function allows us to automatically optimize robot designs based on specifications expressed as a function of range of motion or actuator forces. We evaluate our model by computationally optimizing two simulated robots that employ linear actuators: a manipulator and a large quadruped. We further validate our framework by optimizing the design of a small quadrupedal robot and testing its performance using a hardware implementation.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.