Abstract
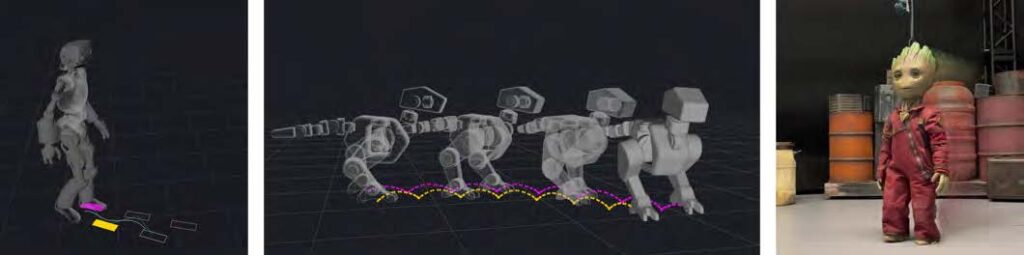
Procedural animation has seen widespread use in the design of expressive walking gaits for virtual characters. While similar tools could breathe life into robotic characters, existing techniques are largely unaware of the kinematic and dynamic constraints imposed by physical robots. In this paper, we propose a system for the artist-directed authoring of stylized bipedal walking gaits, tailored for execution on robotic characters. The artist interfaces with an interactive editing tool that generates the desired character motion in real-time, either on the physical or simulated robot, using a model-based control stack. Each walking style is encoded as a set of sample parameters which are translated into whole-body reference trajectories using the proposed procedural animation technique. In order to generalize the stylized gait over a continuous range of input velocities, we employ a phase-space blending strategy that interpolates a set of example walk cycles authored by the animator while preserving contact constraints. To demonstrate the utility of our approach, we animate gaits for a custom, free-walking robotic character, and show, with two additional in-simulation examples, how our procedural animation technique generalizes to bipeds with different degrees of freedom, proportions, and mass distributions.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.