Abstract
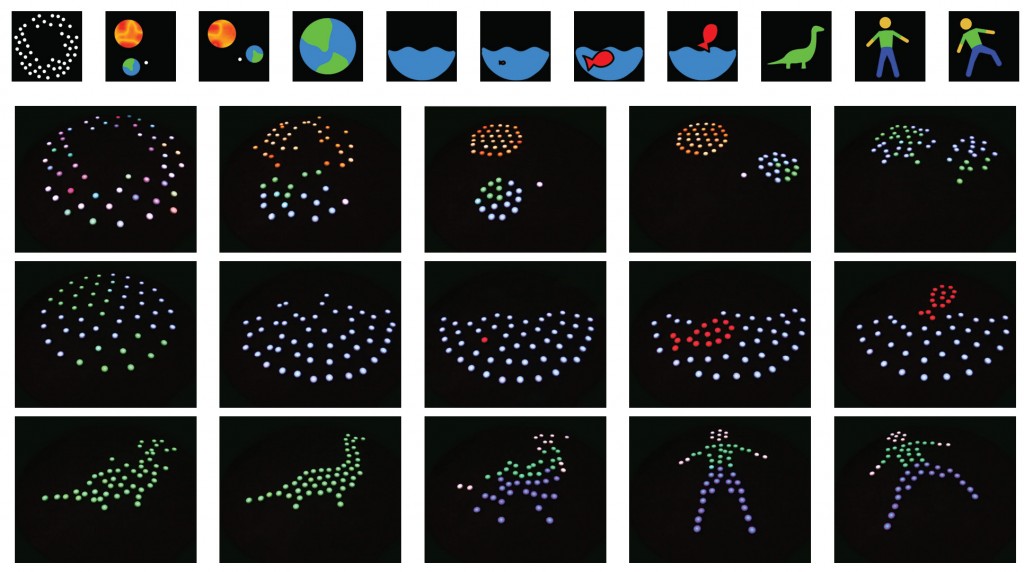
In this article, we present a novel display that is created using a group of mobile robots. In contrast to traditional displays that are based on a fixed grid of pixels, such as a screen or a projection, this work describes a display in which each pixel is a mobile robot of controllable color. Pixels become mobile entities, and their positioning and motion are used to produce a novel experience. The system input is a single image or an animation created by an artist. The first stage is to generate physical goal configurations and robot colors to optimally represent the input imagery with the available number of robots. The run-time system includes goal assignment, path planning, and local reciprocal collision avoidance, to guarantee smooth, fast and oscillation-free motion between images. The algorithms scale to very large robot swarms and extend to a wide range of robot kinematics. Experimental evaluation is done for two different physical swarms of size 14 and 50 differentially driven robots, and for simulations with 1,000 robot pixels.
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.