Abstract
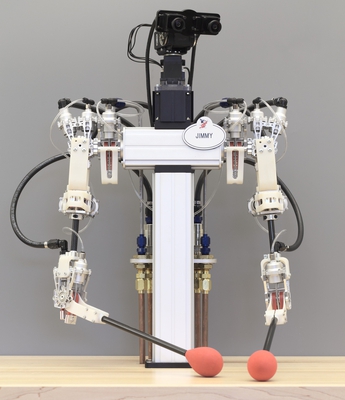
We present a new type of hydrostatic transmission that uses a hybrid air-water configuration, analogous to N+1 cable-tendon transmissions, using N hydraulic lines and 1 pneumatic line for a system with N degrees of freedom (DOFs). The common air-filled line preloads all DOFs in the system, allowing bidirectional operation of every joint. This configuration achieves the high stiffness of a water-filled transmission with half the number of bulky hydraulic lines. We implemented this transmission using pairs of rolling-diaphragm cylinders to form rotary hydraulic actuators, with a new design achieving a 600-percent increase in specific work density per cycle. These actuators were used to build a humanoid robot with two 4-DOF arms, connected via the hydrostatic transmission to an identical master. Stereo cameras mounted on a 2-DOF servo-controlled neck stream live video to the operator’s head-mounted display, which in turn sends the real-time attitude of the operator’s head to the neck servos in the robot. The operator is visually immersed in the robot’s physical workspace, and through the bilateral coupling of the low-impedance hydrostatic transmission, directly feels interaction forces between the robot and external environment. We qualitatively assessed the performance of this system for remote object manipulation and use as a platform to safely study physical human-robot interaction.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.