Abstract
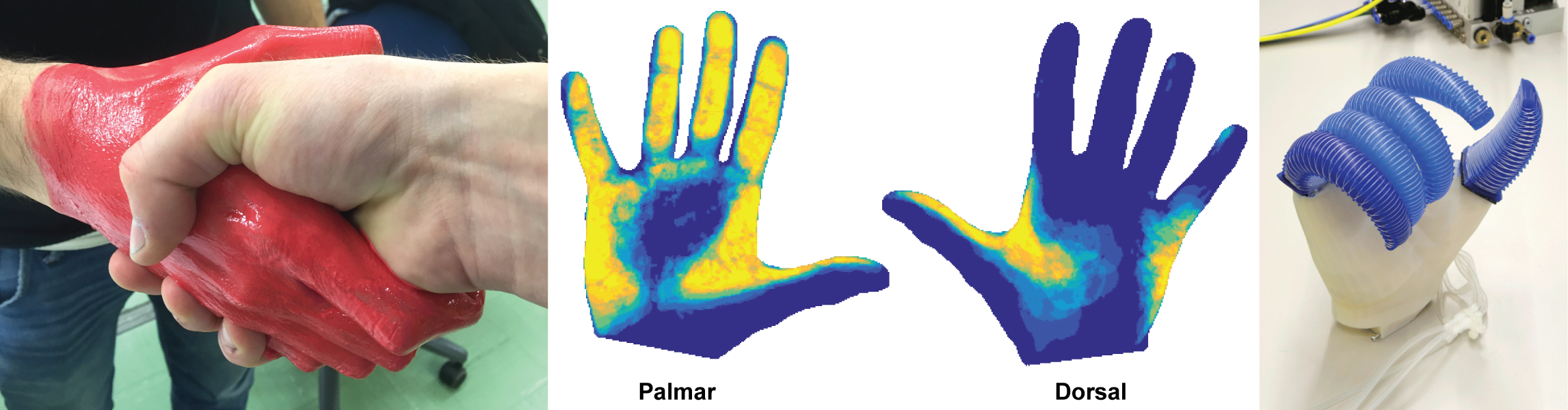
Handshakes are common greetings, and humans, therefore, have strong priors of what a handshake should feel like. This makes it challenging to create compelling and realistic human-robot handshakes, necessitating the consideration of human haptic perception in the design of robot hands. At its most basic level, haptic perception is encoded by contact points and contact pressure distributions on the skin. This motivates our work on measuring the contact area and contact pressure in human handshaking interactions. We present two benchmarking experiments in this regard, measuring the contact locations in human-human/human-robot handshaking and the contact pressure distribution for handshakes with a sensorized palm. We present results from human studies with the benchmarking experiments, providing a baseline for comparison with robot hands as well as presenting new insights into human handshaking. We also show initial work in using these results for the evaluation of robot hands and progressing towards iterative design of robot hands optimized for social hand interactions.
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.