Abstract
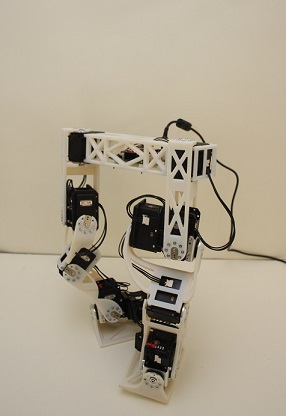
Our goal is to bring animation characters to life in the real world. We present a bipedal robot that looks like and walks like an animation character. We start from animation data of a character walking. We develop a bipedal robot which corresponds to lower part of the character following its kinematic structure. The links are 3D printed and the joints are actuated by servo motors. Using trajectory optimization, we generate an open-loop walking trajectory that mimics the character’s walking motion by modifying the motion such that the Zero Moment Point stays in the contact convex hull. The walking is tested on the developed hardware system.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.