Abstract
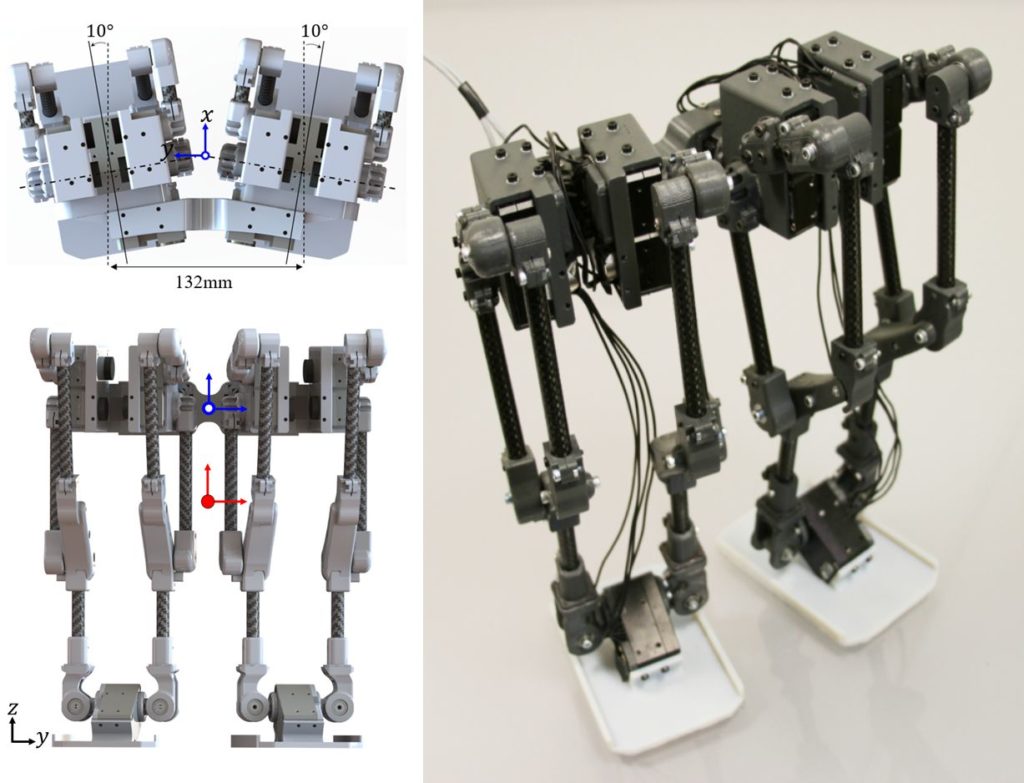
In this paper, we present the design and performance evaluation of a bipedal robot that utilizes the Hybrid Leg mechanism. It is a leg mechanism that achieves 6 DOF with a combined structure of serial and parallel mechanism. It is designed to have a light structural inertia and large workspace for agile bipedal locomotion. A new version of Hybrid Leg is fabricated with carbon fiber tubes and bearings to improve its structural rigidity and accuracy while supporting its weight. A pair of Hybrid Legs is assembled together for bipedal locomotion. In the assembly, we adopt a pelvis structure with an yaw angle offset to enlarge the feet workspace, inspired by the toe-out angle of the human feet. The workspace and range of velocity are presented in simulation and verified with hardware experiments. We also demonstrate a simple forward walking motion with the developed robot.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.