Abstract
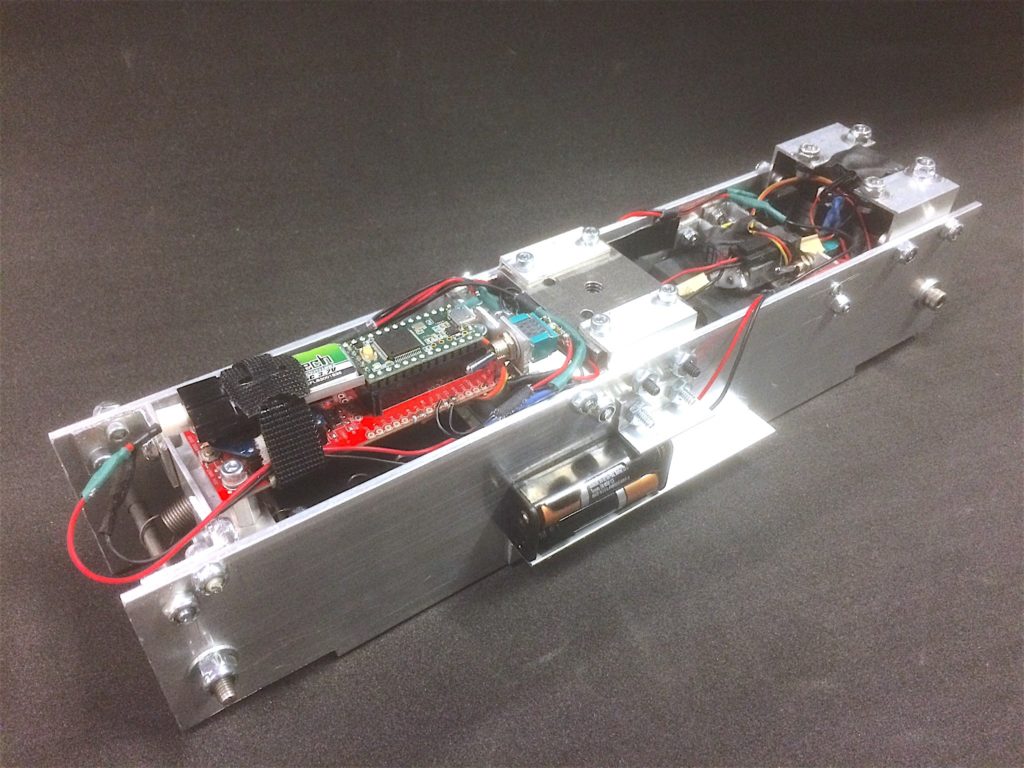
As agile robots learn to run and hop, we believe they will soon also perform large jumps and spins that require graceful landing. To land properly, they will need to be aware of their relative body orientation during free fall and make appropriate adjustments. In this paper, we examine the sensing and actuation necessary for a mechanism to alter its fall under a high rate of spin. We also present a simple new robot, the Binary Robotic Inertially Controlled bricK (BRICK). This device combines information from an accelerometer, a gyroscope, and a laser range-finder to track its orientation, and adjusts spin mid-flight by rapidly changing its moment of inertia between two states. An error analysis shows mechanical inaccuracies and uncertainty to be the largest source of variation. Nevertheless, our mechanism is able to fall from arbitrary heights, with arbitrary spin, and always land in a desired orientation.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.