Abstract
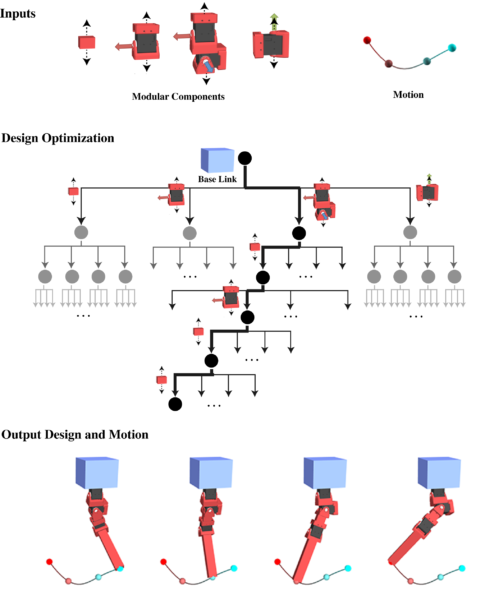
We present a novel computational approach to designing robotic devices from high-level motion specifications. Our computational system uses a library of modular components— actuators, mounting brackets, and connectors—to define the space of possible robot designs. The process of creating a new robot begins with a set of input trajectories that specify how its end effectors and/or body should move. By searching through the combinatorial set of possible arrangements of modular components, our method generates a functional, as-simple-as possible robotic device that is capable of tracking the input motion trajectories. To significantly improve the efficiency of this discrete optimization process, we propose a novel heuristic that guides the search for appropriate designs. Briefly, our heuristic function estimates how much an intermediate robot design needs to change before it becomes able to execute the target motion trajectories. We demonstrate the effectiveness of our computational design method by automatically creating a variety of robotic manipulators and legged robots. To generate these results, we define our own robotic kit that includes off the- shelf actuators and 3D printable connectors. We validate our results by fabricating two robotic devices designed with our method.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.