Abstract
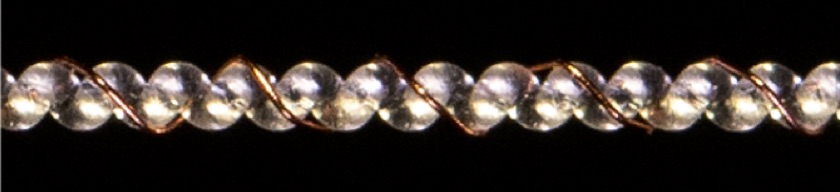
Coiled actuators made from polymer fibers are fast becoming popular due to their low-cost and ease of fabrication. Unfortunately, reliable real-time temperature measurement has been frustrated by the small fiber diameter of typical actuators. By using coiled polymer fibers wrapped with a metal wire, we demonstrate the ability to concurrently drive a muscle by electrothermal heating, and monitor muscle temperature through the wire resistance. This simple method enables convenient overheat protection for these muscles, as well as the possibility for closed-loop temperature control. Using this platform, we demonstrate a nested controller using temperature and position feedback to improve contraction speed, and investigate the cooling rates of various configurations that increase total force output.
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.