Abstract
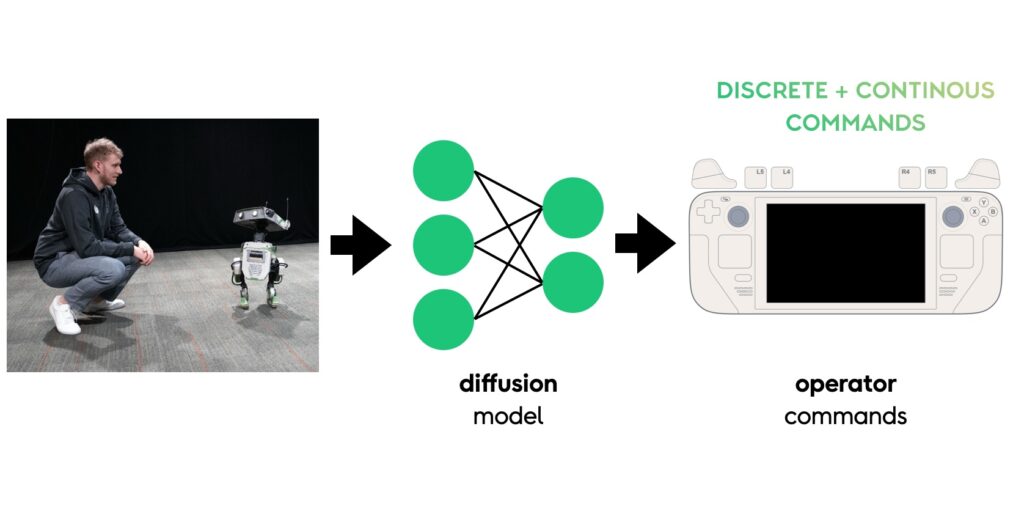
Teleoperated robotic characters can perform expressive interactions with humans, relying on the operators’ experience and social intuition. In this work, we propose to create autonomous interactive robots, by training a model to imitate operator data. Our model is trained on a dataset of human-robot interactions, where an expert operator is asked to vary the interactions and mood of the robot, while the operator commands as well as the pose of the human and robot are recorded. Our approach learns to predict continuous operator commands through a diffusion process and discrete commands through a classifier, all unified within a single transformer architecture. We evaluate the resulting model in simulation and with a user study on the real system. We show that our method enables simple autonomous human-robot interactions that are comparable to the expert-operator baseline, and that users can recognize the different robot moods as generated by our model. Finally, we demonstrate a zero-shot transfer of our model onto a different robotic platform with the same operator interface.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.