Abstract
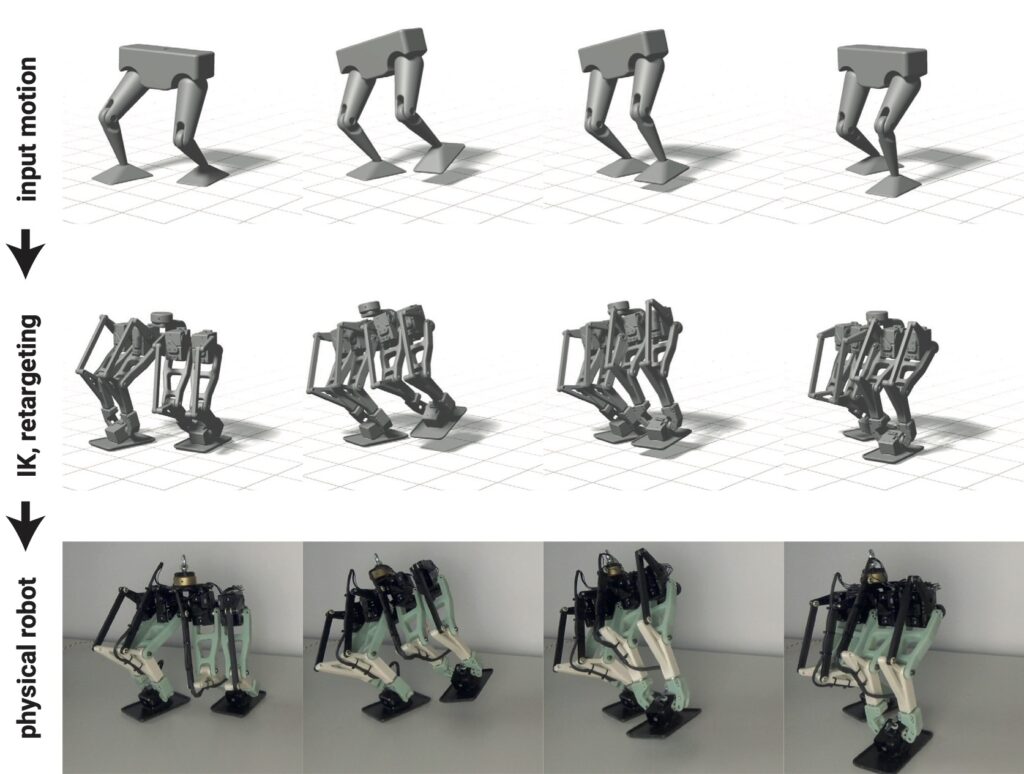
Robots with kinematic loops are known to have superior mechanical performance. However, due to these loops, their modeling and control is challenging, and prevents a more widespread use. In this paper, we describe a versatile Inverse Kinematics (IK) formulation for the retargeting of expressive motions onto mechanical systems with loops. We support the precise control of the position and orientation of several end-effectors, and the Center of Mass (CoM) of slowly walking robots. Our formulation safeguards against a disassembly when IK targets are moved outside the workspace of the robot, and we introduce a regularizer that smoothly circumvents kinematic singularities where velocities go to infinity. With several validation examples and three physical robots, we demonstrate the versatility and efficacy of our IK on overactuated systems with loops, and for the retargeting of an expressive motion onto a bipedal robot.
Additional Content
Acknowledgement
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.