Abstract
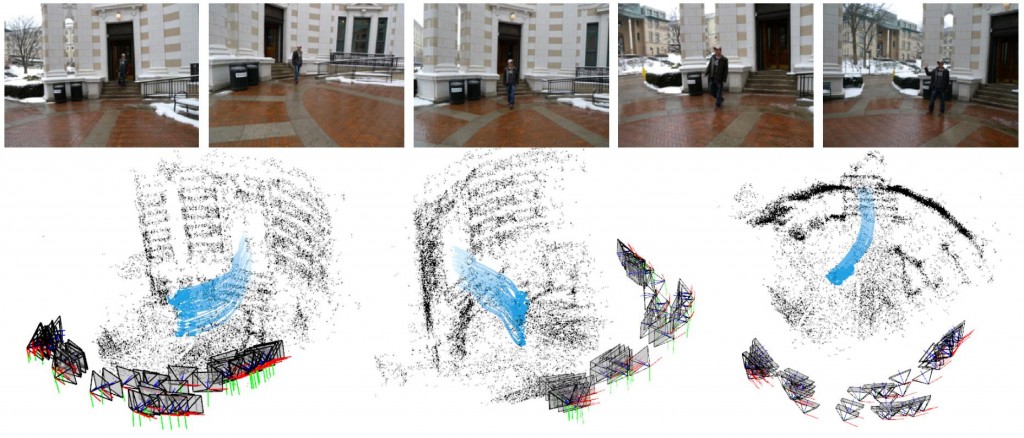
This paper presents a linear solution for reconstructing the 3D trajectory of a moving point from its correspondence in a collection of 2D perspective images, given the 3D spatial pose and time of capture of the cameras that produced each image. Triangulation-based solutions do not apply, as multiple views of the point may not exist at each instant in time. A geometric analysis of the problem is presented and a criterion, called reconstructibility, is de ned to precisely characterize the cases when reconstruction is possible, and how accurate it can be. We apply the linear reconstruction algorithm to reconstruct the time evolving 3D structure of several real-world scenes, given a collection of non-coincidental 2D images.
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.