Abstract
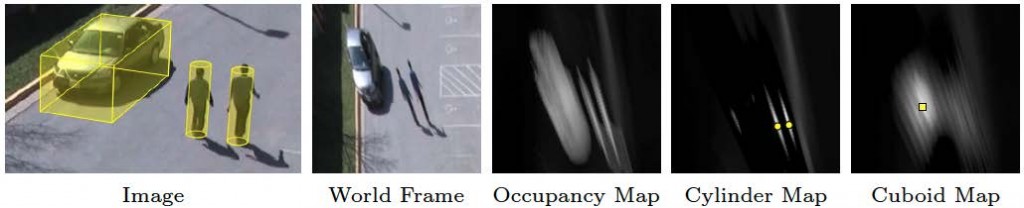
Multiview object detection methods achieve robustness in adverse imaging conditions by exploiting projective consistency across views. In this paper, we present an algorithm that achieves performance comparable to multiview methods from a single camera by employing geometric primitives as proxies for the true 3D shape of objects, such as pedestrians or vehicles. Our key insight is that for a calibrated camera, geometric primitives produce predetermined location-specific patterns in occupancy maps. We use these to define spatially-varying kernel functions of projected shape. This leads to an analytical formation model of occupancy maps as the convolution of locations and projected shape kernels. We estimate object locations by deconvolving the occupancy map using an efficient template similarity scheme. The number of objects and their positions are determined using the mean shift algorithm. The approach is highly parallel because the occupancy probability of a particular geometric primitive at each ground location is an independent computation. The algorithm extends to multiple cameras without requiring significant bandwidth. We demonstrate comparable performance to multiview methods and show robust, real-time object detection on full resolution HD video in a variety of challenging imaging conditions.
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.