Abstract
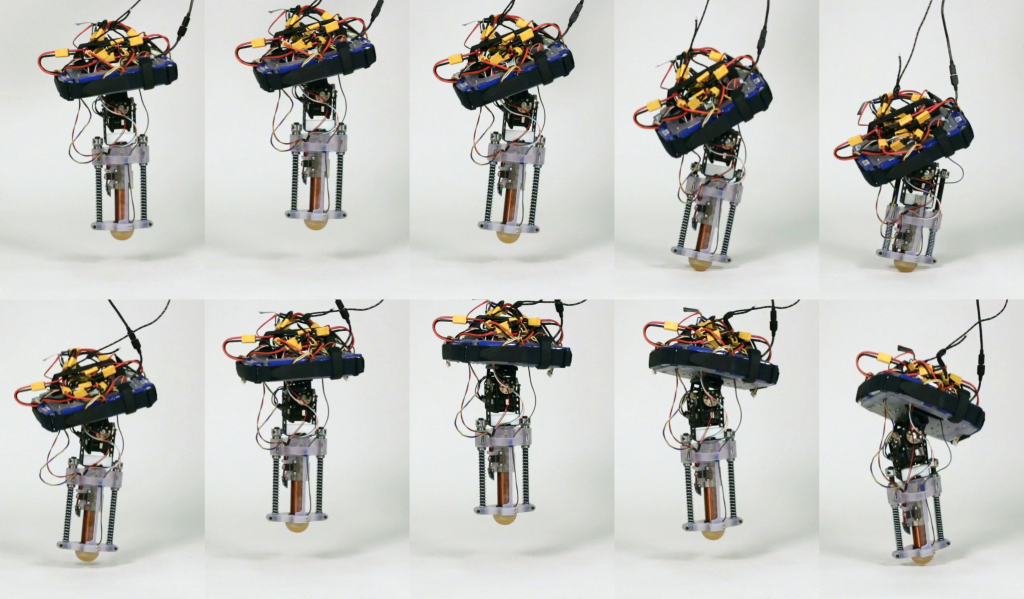
Current and previous single-legged hopping robots are energetically tethered and lack portability. Here, we present the design and control of an untethered, energetically autonomous single-legged hopping robot. The thrust-producing mechanism of the robot’s leg is an actuated prismatic joint, called a linear elastic actuator in parallel (LEAP). The LEAP mechanism comprises a voice coil actuator in parallel with two compression springs, which gives our robot passive compliance. An actuated gimbal hip joint is realized by two standard servomotors. To control the robot, we adapt Raibert’s hopping controller, and find we can maintain balance roughly in place for up to approx. 7 seconds (19 hops) while continuously hopping.
Additional Content
Copyright Notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.